- Home | Produkte | Produktdetails
Weboffer
0 Artikel
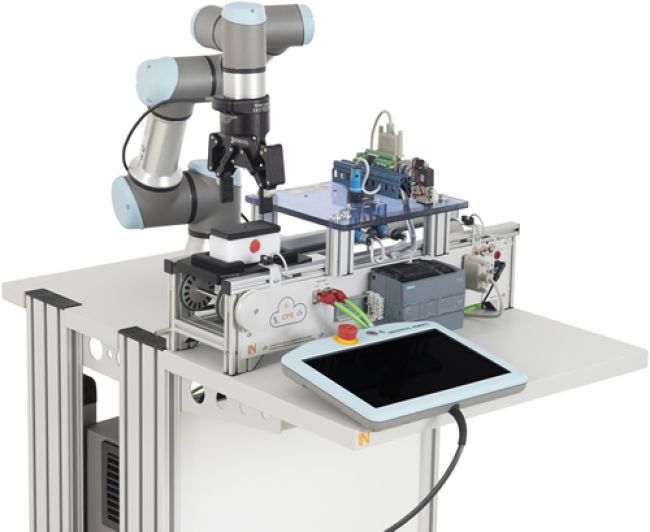
Kollaborativer 6-Achs Roboterarm
Der 6-achsige Roboterarm benötigt keine Schutzumhausung. Die kollaborativen Eigenschaften des Arms ermöglichen ein gefahrloses Arbeiten mit dem Roboter ohne Schutzmaßnahmen. Die Empfindlichkeit der Kraftabschaltung ist einstellbar. Der montierte Zweifinger Greifer kann gezielt, stufenweise geöffnet und geschlossen werden. Ebenso die Kraft, mit der der Greifer zupackt, kann für jeden Projektpunkt separat und unterschiedlich eingestellt werden. So sind viele unterschiedliche Projektaufgaben möglich. Mit dem integrierten Kamerasystem kann der kollaborierende Roboter Objekte sicher in Form und Lage erkennen und diese dann an vordefinierten Positionen greifen. Je nach Lage des zu greifenden Objekts passt sich der Roboter automatisch an die neue Lage an.
- Automatisierungstechnik
- Sicherheitstechnik
- Robotik
-
Mechatronische Systeme
-
IMS Industrial Mechatronic System - die neue Generation
- IMS Factory App
- IMS 1.5 intelligentes Transportsystem DC
- IMS 3 Subsystem Vereinzeln
- IMS 3d Subsystem Vereinzeln mit Doppelmagazin
- IMS 4 Subsystem Oberteilmontage
- IMS 4d Subsystem Oberteilmontage mit Doppelmagazin
- IMS 5 Subsystem Bearbeiten
- IMS 5d Subsystem Bearbeiten mit Doppelmagazin
- IMS 6 Subsystem Prüfen
- IMS 7 Subsystem Handhaben
- IMS 8 Subsystem Lagern
- IMS 13 Subsystem Bohren und Fräsen
- IMS 15 Subsystem 3-Achs Portalroboter
- IMS 16 Subsystem Lackieren
- IMS 17 Subsystem Labeln
- IMS 18 Subsystem Kamera Inspektion
- IMS 19 Subsystem Qualitätskontrolle mit KI
-
IMU Industrial Mechatronic Unit - die Industrie für das Labor
- IMU 1 Industrial Mechatronic Unit
- IMU mit IMS 3 Subsystem Vereinzeln
- IMU mit IMS 3 Subsystem Vereinzeln mit Doppelmagazin
- IMU mit IMS 4 Subsystem Oberteilmontage
- IMU mit IMS 4 Subsystem Oberteilmontage mit Doppelmagazin
- IMU mit IMS 5 Subsystem Bearbeiten
- IMU mit IMS 5 Subsystem Bearbeiten mit Doppelmagazin
- IMU mit IMS 6 Subsystem Prüfen
- IMU mit IMS 7 Subsystem Handhaben
- IMU mit IMS 13 Subsystem Bohren und Fräsen
- IMU mit IMS 16 Subsystem Lackieren
- IMU mit IMS 17 Subsystem Labeln
- IMU mit IMS 18 Subsystem Kamera Inspektion
- IMU mit IMS 19 Subsystem Qualitätskontrolle mit KI
-
IMS Industrial Mechatronic System - die neue Generation
-
Industrie 4.0
- IMS Industrial Mechatronic System - die neue Generation
- IMU Industrial Mechatronic Unit - die Industrie für das Labor
- Industrial Process Automation
- Hardware-Einrichtung
- Koordinatensysteme
- Robotersteuerung
- Roboterbewegung
- Arbeiten mit Projekten
- Fünf Projektarbeiten zum Erlenen vieler Roboterfunktionen
- Robotersteuerung mit SPS
- Einrichtung der Profinet-Kommunikation
- Zwei Projektarbeiten zum Erlernen der Kommunikation zwischen Roboter und SPS
- Programmierung eines echten Industrieroboters
- Alle Freiheitsgrade durch 6 Achsen
- Ortsunabhängiger Einsatz durch rollbaren mobilen Wagen
- Keine Schutzumhausung notwendig
- Integriertes Kamerasystem
- Einstellbare Empfindlichkeit zur Kraftabschaltung

Kollaborierender e-Serie 6-Achs 3kg-Roboterarm mit Kamera und Greifer
Das System besteht aus einem kollaborativen 6-Achs Roboterarm mit elektrischem Greifer und integriertem Kamerasystem. Der Roboter ist ohne lange Einarbeitungszeit schnell programmierbar, kann leicht eingerichtet werden und ist außerdem kollaborierend und sicher. Dank der intuitiven Software lernen selbst unerfahrene Bediener schnell die Grundlagen der Programmierung. Gewünschte Wegpunkte können entweder über das Teachpendant angefahren und gespeichert werden oder über die Handführfunktion. Der Roboterarm kann im Handführmodus mit der Hand direkt zur gewünschten Position bewegt werden.
Technische Daten Roboterarm:
Leistung:
- Stromverbrauch ca. 100 W
- Kollaborativer Betrieb: 17 erweiterte konfigurierbare Sicherheitsfunktionen inklusive Ellbogenüberwachung. Fernsteuerung nach ISO 10218
- Zertifikate: EN ISO 13849-1, Cat 3, PLd und EN ISO 10218-1
Spezifikationen:
- Arbeitsradius: 500 mm / 19.7 in
- Traglast: 3 kg /6.6 lbs
- Wiederholgenauigkeit: +/- 0,03 mm mit Ladung gemäß ISO 9283
Eigenschaften
- I/O Ports: 2 DI, 2 DO, 2 AI
- IP-Klassifizierung: IP54
- I/O-Stromversorgung im Werkzeug: beständig 12 V / 24 V 600 mA, 2 A über kürzere Zeiträume
- Elektrischer Greifer: Greifkraft einstellbar 20 N bis 235 N, Hub bis 85 mm
- Kamerasystem: Maximale Auflösung: 5 Mpx (2560 x 1920), maximale Bildfrequenz: 30 fps
Technische Daten Steuergerät:
- IP-Klassifizierung: IP54
- I/O-Ports: 16 DI, 16 DO, 2 AI, 2 AO, 4 separate High-Speed-Eingänge
- Kommunikation: ModbusTCP, ProfiNet, EthernetIP und USB
- 100-240 VAC, 47-440 Hz
Technische Daten Programmiergerät:
- IP-Klassifizierung: IP54
- Bildschirmauflösung: 1280 x 800 Pixel
- Kabellänge: 4,5 m / 177.17 in

Mechatronik Aluprofil Wagen für kollaborativen Roboterarm 60*76, 600x900x760mm (
Hochwertiger, fahrbarer Experimentier- und Demostand der SybaPro Reihe mit Aluprofil-Tischbeinen kompatibel zu allen An- und Ausbauteilen des SybaPro Systems.
Er ermöglicht die Montage eines kollaborativen 6-Achs Roboterarm. Als zusätzliche Befestigungsmöglichkeit besteht die Anbringung eines mechatronischen Transportsystems mit Bearbeitungsstation. Somit sind verschiedene Projektarbeiten möglich.
- Seitenteile aus Alu-Strangpressprofil mit Vielnutprofilierung
- 8 gleichwertige Nuten im Alu-Strangpressprofil (3 je Seite + 1 je Kopfseite)
- Nuten zur Aufnahme von industriegenormten Halterungen
- Kompatibel zu allen Anbauten der SybaPro Serie (z. B. Monitorhalter, Beleuchtung etc.)
- 2 naturgebürstete Alu H-Profile zur Aufnahme der Lehrplatten DIN A4 Höhe unterhalb der Tischplatte
- Innenliegende Bürstenleisten garantieren die Schonung der Experimentierplatten und ein geräuschloses Umstecken der Steckverbindungen während eines Versuches.
- Tischfüße aus Rechteckrohr mit 4 lenkbaren Doppelrollen, davon 2 gebremst
- Tischzarge aus stabiler, umlaufender Rechteckrohrkombination
- 4 lenkbare Doppelrollen, davon 2 gebremst
- Säurebeständige Epoxidharzbeschichtung von ca. 80µm, Farbe RAL7047
- Geeignet zum Unterbau eines 3 HE Stromversorgungskanals/Energiekanals
- Tischplatte 600x30x900mm, Bodenplatte 525x30x525mm (B x H x T)
- Hochverdichtete mehrschichtige Feinspanplatte nach DIN EN 438-1; Farbe hellgrau; mit beidseitig 0,8mm leicht strukturiertem Schichtstoffbelag (Resopal) nach DIN 16926
- Einfassung der Tischplatte mit massiver, schlagzäher Schutzkante aus 3mm dickem, durchgefärbtem Kunststoff der Farbe RAL7047
- Belag und Umleimer sind PVC frei
- Angebaute schaltbare Steckdosenleiste, 5-fach
- Tischplattenhöhe 760mm
- Gesamtmaß 600x900x760mm
Dieser mobile Experimentierstand wird bereits montiert geliefert.

Station Prüfen
Die Station Prüfen untersucht die auf dem Transportband passierenden Werkstücke auf Material und Farbe.
- 4 binäre Prüfsensoren (2 x optisch, induktiv, kapazitiv)
- Magnetischer Endlagensensor
- Stoppzylinder, doppeltwirkend
- 4/2-Wege Ventil
- SPS-Schnittstelle auf SUB-D 25-polig
Anforderung an die SPS: 1 x digital Out, 5 x digital In

Cyber-physisches Transportsystem mit IO-Link
Mechatronisches Basismodul angetrieben mit einem drehzahlvariablen 24 V-Getriebemotor. Zwei Endlagensensoren am Anfang und am Ende des Transportsystems. Für grundlegende Experimente an einem Transportsystem oder zum Einbau in ein komplexes mechatronisches System zur Steuerung des Materialflusses. Eine auf der Frontseite montierte Siemens SPS ist frei programmierbar und übernimmt die Steuerung des Moduls. Das Transportband transportiert Werkstückträger mit Werkstücken, verbindet einzelne Stationen. Es kann mit anderen Transportbändern, Kurven oder Transferknoten kombiniert werden. Über den 25-poligen D-Sub Anschluss können die auf dem Förderband angebrachten Bearbeitungsstationen über die SPS gesteuert werden. Das Förderband samt Steuerung bildet eine kompakte Einheit. Ohne aufwändige Umbaumaßnahmen oder Veränderung der Verkabelung kann das System aus einer Gesamtanlage separiert und zum Einzelarbeitsplatz genommen werden. Ein Umbau oder komplizierter Auseinanderbau von Tischen entfällt somit.
Über einen integrierten Switch ist eine Vernetzung mehrerer Transportsysteme problemlos möglich. PROFINET Kabel können von einem Transportsystem zum nächsten geschleift werden. Die einzelnen Systeme müssen nicht alle separat mit einem zentralen Switch verbunden werden. Dicke Kabelbäume und das Verlegen langer Kabel entfallen somit.
Ein integriertes Modul dient zur Messung und Auswertung der Leistungs- und Energieaufnahme des Gesamtsystems (Transportsystem, Steuerung und optionaler Station). Diese Werte ermöglichen eine Beurteilung der Energieeffizienz und geben Hinweise auf deren Optimierung. Sie können per LAN an übergeordnete Leitstellen übermittelt werden, wo ein Energiemanagement implementiert ist.
- Länge = 600 mm, Breite = 160 mm, Spur = 120 mm
- Getriebemotor, 24 V DC
- Zur Ansteuerung des Bandes mit variabler Geschwindigkeit kann das PWM Signal der SPS verwendet werden
- 2 x Magnetfeld Endlagensensoren
- 3 x dreipolige Klemmanschlüsse zum Anschluss von digitalen Sensoren
- 25-polige D-Sub Schnittstelle zum Anschluss von Bearbeitungsstationen
- Im 25-poligen Anschluss integrierte Übertragung des IO-Link Sensorsignals der Station zur Steuerung
- 2 x M12 Schnittstelle mit jeweils einem digitalen Ein- und einem Ausgang zur Kommunikation mit anderen Förderbändern
- 2 x RJ45 Schnittstelle an der Frontseite
- Externe Spannungsversorgung über 4 mm Sicherheitsbuchsen oder Hohlstecker
- Inkrementalscheibe für Positionserfassung und Geschwindigkeitsmessung über optischen Sensor
- Verwendete Steuerung: S7-1215 DC/DC/DC mit 14 DI und 10 DO
- Zusätzliches Kommunikationsmodul mit 2 DI und 2 DO
- 2 x Rasttastschalter zur Simulation digitaler Eingänge des Kommunikationsmoduls
- Messung der Leistungs- und Energieaufnahme
- Hutschiene zur Erweiterung der SPS mit analogen oder digitalen IO Modulen
- Erweiterung der SPS um ein PROFIBUS-Mastermodul, ein AS-i-Bus Mastermodul möglich
- 1 x RJ45 Kabel
- 1 x Step 7 Basic mit aktueller Version Step7 des TIA-Portals
Achtung: Nur für Schulen und Ausbildungsstätten im nicht gewerblichen Bereich.
Zusätzlich im Transportsystem enthalten und vormontiert:
IO-Link Mastermodul
IO-Link Mastermodul für S7-1200 Steuerungen. An das Mastermodul lassen sich bis zu vier IO-Link Teilnehmer anschließen.
IO-Link RFID Schreib-/Lesekopf
Inkl. Halterung und Anschlusskabel.
- Elektrische Daten
- Betriebsspannung 11...32 VDC
- Datenübertragung: induktive Kopplung
- Technologie: HF (13,56 MHz)
- Funk- und Protokollstandard: ISO 15693
- Drahtbruchsicherheit und Verpolungsschutz
- Schnittstelle: Vierdraht, IO-Link
- Mechanische Daten
- Umgebungstemperatur: -25...+70 °C
- El. Anschluss: Steckverbinder, M12 x 1
- Schutzart: IP67
- Gehäusewerkstoff: Metall, CuZn, verchromt
- Bauform: Gewinderohr, M18 x 1
- IO-Link
- IO-Link Porttyp: Class A
- Prozessdatenbreite: 32 Bit
Modul Wegmessung
Optischer Sensor für inkrementelle Wegmessung
- Schaltelementfunktion: PNP Schließer
Betriebsspannung: 24 V

DC-Netzteil (24V/5A) für IMS Bänder
Netzteil zur Spannungsversorgung von 24 V Verbrauchern.
- Eingangsspannungsbereich: (85 - 264) V AC
- Eingangsfrequenzbereich: (47 - 63) Hz
- Ausgangsspannung: 24 V DC
- Maximaler Ausgangsstrom: 5 A
- Maximale Leistung: 120 W

Schnittstellenkabel 25-polig, Sub-D-Buchse/ Stecker 1 m
25-pol SUB-D Verbindungskabel
- Anschluss: 25-pin Stecker / 25-pin Buchse
- Länge: 1 m
- Kontaktbelegung: 1:1

Symmetrische Werkstückträgerplatte
Werkstückträger zur Aufnahme und zum Transport von Werkstücken auf Transportbändern. Der Werkstückträger verfügt über eine Einkerbung zur Aufnahme eines RFID-Tags.
- Länge = 180 mm, Breite = 119 mm, Höhe = 15 mm
- 2 Positionsgeber

Interactive Lab Assistant: CCR 2 Projektierung Kollaborierender Roboter
Die Versuchsanleitung bildet ein Interactive Lab Assistant Kurs. Dieser Multimediakurs führt Schritt für Schritt in die Thematik der kollaborierenden Robotertechnik. Technologische Grundlagen werden durch bildliche Darstellungen und Animationen leicht verständlich.
Besonderheiten:
- Fragen mit Feedback und Auswertelogik zur Wissensstandkontrolle
- Druckdokument zum komfortablen Ausdruck der Versuchsanleitung mit Lösungen
- Labsoft-Browser und Kurssoftware
Inhalte:
- Hardware-Einrichtung
- Koordinatensysteme
- Robotersteuerung
- Roboterbewegung
- Arbeiten mit Projekten
- Fünf Projektarbeiten zum Erlenen vieler Roboterfunktionen
- Robotersteuerung mit SPS
- Einrichtung der Profinet-Kommunikation
- Zwei Projektarbeiten zum Erlernen der Kommunikation zwischen Roboter und SPS
- Kursdauer: ca. 16h

QuickChart IMS 6 Mechatronisches Subsystem Prüfen
Kurzdokumentation zur schnellen Inbetriebnahme komplexer Geräte und Versuchsaufbauten.
- Anschlussbelegung, Sicherheitshinweise, Hilfestellungen
- Schalt- oder Montageplan
- Farbdruck im Format DINA3
- Laminierung: 2x250 µm


Modul CCR 2 gehört zum Industrie 4.0 Erweiterungsmöglichkeiten Paket
Sie haben schon Module und möchten diese erweitern?
Kein Problem...
Weitere Module für das CCR 2-Paket




- Automatisierungstechnik
- Industrie 4.0
- IMS Industrial Mechatronic System - die neue Generation
- Industrie 4.0 Erweiterungsmöglichkeiten
- CCR 2 Kollaborativer 6-Achs Roboterarm
- Automatisierungstechnik | Industrie 4.0 | IMS Industrial Mechatronic System - die neue Generation | Industrie 4.0 Erweiterungsmöglichkeiten | CCR 2 Kollaborativer 6-Achs Roboterarm |