- Home | Produkte | Produktdetails
Weboffer
0 Artikel
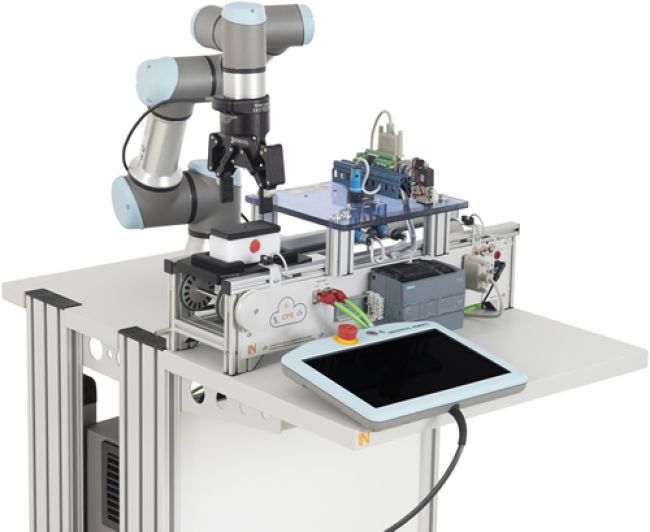
Industrie Roboter mit Projektausstattung Prüfen
Mit der Projektausstattung 'Prüfen' wird die Projektierung des Industrie Roboters um eine mechatronische Prüfstation erweitert. Mit Hilfe der verschiedenen Sensoren (zwei optische, ein induktiver und ein kapazitiver) wird die Zusammensetzung der auf dem Werkstückträger befindlichen Werkstücke untersucht. Das Prüfergebnis wird von der SPS über Profinet an den Roboter übermittelt. Je nach Prüfergebnis kann der Roboter verschieden reagieren.
- Automatisierungstechnik
- Sicherheitstechnik
- Robotik
-
Mechatronische Systeme
-
IMS Industrial Mechatronic System - die neue Generation
- IMS Factory App
- IMS 1.5 intelligentes Transportsystem DC
- IMS 3 Subsystem Vereinzeln
- IMS 3d Subsystem Vereinzeln mit Doppelmagazin
- IMS 4 Subsystem Oberteilmontage
- IMS 4d Subsystem Oberteilmontage mit Doppelmagazin
- IMS 5 Subsystem Bearbeiten
- IMS 5d Subsystem Bearbeiten mit Doppelmagazin
- IMS 6 Subsystem Prüfen
- IMS 7 Subsystem Handhaben
- IMS 8 Subsystem Lagern
- IMS 13 Subsystem Bohren und Fräsen
- IMS 15 Subsystem 3-Achs Portalroboter
- IMS 16 Subsystem Lackieren
- IMS 17 Subsystem Labeln
- IMS 18 Subsystem Kamera Inspektion
- IMS 19 Subsystem Qualitätskontrolle mit KI
-
IMU Industrial Mechatronic Unit - die Industrie für das Labor
- IMU 1 Industrial Mechatronic Unit
- IMU mit IMS 3 Subsystem Vereinzeln
- IMU mit IMS 3 Subsystem Vereinzeln mit Doppelmagazin
- IMU mit IMS 4 Subsystem Oberteilmontage
- IMU mit IMS 4 Subsystem Oberteilmontage mit Doppelmagazin
- IMU mit IMS 5 Subsystem Bearbeiten
- IMU mit IMS 5 Subsystem Bearbeiten mit Doppelmagazin
- IMU mit IMS 6 Subsystem Prüfen
- IMU mit IMS 7 Subsystem Handhaben
- IMU mit IMS 13 Subsystem Bohren und Fräsen
- IMU mit IMS 16 Subsystem Lackieren
- IMU mit IMS 17 Subsystem Labeln
- IMU mit IMS 18 Subsystem Kamera Inspektion
- IMU mit IMS 19 Subsystem Qualitätskontrolle mit KI
-
IMS Industrial Mechatronic System - die neue Generation
-
Industrie 4.0
- IMS Industrial Mechatronic System - die neue Generation
- IMU Industrial Mechatronic Unit - die Industrie für das Labor
- Industrial Process Automation
- Hardwarekonfiguration
- Aufbau und Inbetriebnahme
- Einrichten der I/Os
- Einrichten des Arbeitsbereiches
- Sicherheitseinrichtung
- Grundlagen zu Koordinatensystemen
- Steuerung des Roboterarms
- Unterschiede der Roboterbewegungen
- Projektarbeiten
- Erstellung eines Projektes
- Bewegungsplan
- Bewegungen speichern
- Projektablauf
- Roboterkontrolle durch SPS
- Profineteinstellungen
- Projektierung mit Profinet
- SPS Projektierung
- Projektarbeit mit SPS
- SPS Programm
- Roboter Programm
- Programmierung eines echten Industrieroboters
- Alle Freiheitsgrade durch 6 Achsen
- Ortsunabhängiger Einsatz durch rollbaren mobilen Wagen

Industrie Roboter Kuka KR6 R700-2 mit KR C5 micro, 6 Achsen, 6kg
Der KR 6 R700-2 besitzt eine maximale Traglast von 6,8 kg und eine Reichweite von ca. 726 mm. Der KR Roboter ist konsequent auf besonders hohe Arbeitsgeschwindigkeiten ausgelegt.
- Traglast: 6,8 kg
- Max. Reichweite: 726 mm
- Max. Höhe: 1100,9 mm
- Anzahl der Achsen: 6
- Wiederholgenauigkeit (ISO 9283): ±0,02 mm
- Gewicht: 50 kg
- Einbaulagen: Boden, Decke, Wand
- Schutzklasse: IP 54
Energiezuführung intern verlegt:
- 1 x Luft auf unten genanntes Ventil gelegt
- 1 x Vakuum
- 1 x Bus
- 1 x E/A
Interne Ventile:
- 3 Stück 5/2 Wegeventil in der Roboterhand integriert zu Greiferansteuerung
Die Robotermechanik wird in der Farbe R0000 KUKA Orange ausgeliefert.
Steuerung KR C5 micro:
Die KUKA Robotersteuerung KR C5 micro ist die neueste Technologie zur Ansteuerung der KUKA Kleinroboter. Mit seiner modernen Architektur und zahlreichen Innovationen setzen Sie auf die Zukunft der Steuerungstechnik.
- Neue Systemsoftware KSS 8.7 oder neuer
- Intuitive Kuka smartPAD Steuerung
- Global einsetzbar: Die KR C5 micro erfüllt alle weltweit relevanten ISO-Normen und versteht 25 Sprachen – auch die wichtigsten asiatischen.
Schnittstellen:
- Ethernet- & EtherCAT-Ports
- 24 V Spannungseingang (externe Versorgung für E / A)
- 24 V Spannungsausgang (von externer Versorgung)
- 16 digitale Eingänge (npn / pnp)
- 16 digitale Ausgänge (npn / pnp)
- 3 Eingänge schnelles Messen
- 1 UL-Lampe
- 4 sichere Eingänge: NOT-HALT extern, Bedienerschutz, Quittierung Bedienerschutz, 1 reserviert
- Zustimmung extern
- 2 USB-Ports
- SSD-Slot
- Display-Port
Technische Daten:
- Einspeisung: AC 200 V - 240 V; 50 Hz - 60 Hz
- Achsen: 6 Achsen / 3x12 A + 3x5 A
- CPU-Architektur: Intel X86
- Interner Speicher: 60 Gbyte SSD
- Abmessungen (BxHxT): 300 mm x 134 mm x 392 mm (11.8 in x 5.27 in x 15.4 in)
- Gewicht: 9,8 Kg (21.6 lbs)
- Schutzklasse: IP 20
- Umgebungstemperatur: 0 °C - 45 °C (32 °F - 113 °F)
- Sicherheit:
- ISO 10218-1 Industrieroboter
- ISO 13849-1 Kat. 3 / Performance Level d
- Zulassung: UL
Mitgeliefertes Zubehör:
- Kuka smartPAD
- Externe Akkubox
- Steckerpaket
- Montagewinkel
- Zuleitung
Hinweis: Der Roboterarm darf erst in Betrieb genommen werden, wenn die Maschine, in die die unvollständige Maschine eingebaut werden soll, den Bestimmungen der Maschinenrichtlinie 2006/42/EG entspricht.

Mobiler Experimentierstand mit Schutzumhausung für die Robotik, SybaPro, 1200mm
Der mobile, anreihbare Aluprofil Mechatronik Wagen ist speziell zur Aufnahme mechatronischer Teilsysteme konzipiert. Zum Aufbau von mechatronischen Anlagen mit Fließfertigung oder einem Umlaufsystem, ist der Wagen kaskadierbar und mit robusten Tischverbindern ausgestattet.
- Aluminiumprofil mit integrierten Nuten zum Befestigen verschiedenster Anbauteile (z.B. PC-Halter, Erweiterungsplatte, C-Schienen)
- 4 lenkbare Doppelrollen, davon 2 gebremst
- Tischplatte 1200 x 50 x 900 mm (BxHxT)
- Bodenplatte 1125 x 25 x 525 mm (BxHxT) z.B. für die Aufnahme von Kompressoren oder Hydraulikaggregaten
- Platten mit hochverdichteter mehrschichtige Feinspanplatte nach DIN EN 438-1; Farbe hellgrau; mit beidseitig 0,8 mm leicht strukturiertem Schichtstoffbelag (Resopal) nach DIN 16926
- Einfassung der Tischplatten mit massiver, schlagzäher Schutzkante aus 3 mm dickem, durchgefärbtem Kunststoff der Farbe RAL 7047
- Belag und Umleimer sind PVC frei
- Rändelschrauben sowie Gewindeaufnahmen links und rechts in der Tischzarge zur festen Verkettung mehrerer Wagen
- Untergebaute abschaltbare Steckdosenleiste, 5-fach
- Tischplattenhöhe 760 mm
Dieser mobile Experimentierstand wird bereits montiert geliefert.
Schutzumhausung zur Abgrenzung des Arbeitsbereiches des Roboterarms.
- Drei herausnehmbare Plexiglasabdeckungen mit Aluminiumprofilen
- Sicherheitsschalter zur Überwachung, dass alle Wände festmontiert sind
- Aluminiumprofile begrenzenden Arbeitsbereich zu drei Seiten. Eine lange Seite bleibt zur Bearbeitung frei. Ein ungewolltes Betreten des Arbeitsbereiches wird so verhindert
Zubehör für die Robotersteuereinheit
- Zwei Winkel mit Zubehör zur Befestigung der Robotersteuereinheit zwischen zwei Tischbeinprofilen
- Adapterplatte zum Anschließen der drei Sicherheitsschalter an die Robotersteuereinheit
Amessungen (BHT)
Wagen: 1200x760x900mm
Umhausung: 1200x865x710mm
Gesamtmaß: 1200x1625x900mm

Parallelgreifer für LM9661/LM9691/LM9791
Parallelgreifer für Industrieroboter:
- Kombinierter Greiferfinger für rundes und rechteckiges Material
- 20 mm Hub
- inklusive Schläuche und Montagematerial

Station Prüfen
Die Station Prüfen untersucht die auf dem Transportband passierenden Werkstücke auf Material und Farbe.
- 4 binäre Prüfsensoren (2 x optisch, induktiv, kapazitiv)
- Magnetischer Endlagensensor
- Stoppzylinder, doppeltwirkend
- 4/2-Wege Ventil
- SPS-Schnittstelle auf SUB-D 25-polig
Anforderung an die SPS: 1 x digital Out, 5 x digital In

Cyber-physisches Transportsystem
Mechatronisches Basismodul angetrieben mit einem drehzahlvariablen 24 V-Getriebemotor. Zwei Endlagensensoren am Anfang und am Ende des Transportsystems. Für grundlegende Experimente an einem Transportsystem oder zum Einbau in ein komplexes mechatronisches System zur Steuerung des Materialflusses. Eine auf der Frontseite montierte Siemens SPS ist frei programmierbar und übernimmt die Steuerung des Moduls. Das Transportband transportiert Werkstückträger mit Werkstücken, verbindet einzelne Stationen. Es kann mit anderen Transportbändern, Kurven oder Transferknoten kombiniert werden. Über den 25-poligen D-Sub Anschluss können die auf dem Förderband angebrachten Bearbeitungsstationen über die SPS gesteuert werden. Das Förderband samt Steuerung bildet eine kompakte Einheit. Ohne aufwändige Umbaumaßnahmen oder Veränderung der Verkabelung kann das System aus einer Gesamtanlage separiert und zum Einzelarbeitsplatz genommen werden. Ein Umbau oder komplizierter Auseinanderbau von Tischen entfällt somit.
Über einen integrierten Switch ist eine Vernetzung mehrerer Transportsysteme problemlos möglich. PROFINET Kabel können von einem Transportsystem zum nächsten geschleift werden. Die einzelnen Systeme müssen nicht alle separat mit einem zentralen Switch verbunden werden. Dicke Kabelbäume und das Verlegen langer Kabel entfallen somit.
Ein integriertes Modul dient zur Messung und Auswertung der Leistungs- und Energieaufnahme des Gesamtsystems (Transportsystem, Steuerung und optionaler Station). Diese Werte ermöglichen eine Beurteilung der Energieeffizienz und geben Hinweise auf deren Optimierung. Sie können per LAN an übergeordnete Leitstellen übermittelt werden, wo ein Energiemanagement implementiert ist.
- Länge = 600 mm, Breite = 160 mm, Spur = 120 mm
- Getriebemotor, 24 V DC
- Zur Ansteuerung des Bandes mit variabler Geschwindigkeit kann das PWM Signal der SPS verwendet werden
- 2 x Magnetfeld Endlagensensoren
- 3 x dreipolige Klemmanschlüsse zum Anschluss von digitalen Sensoren
- 25-polige D-Sub Schnittstelle zum Anschluss von Bearbeitungsstationen
- Im 25-poligen Anschluss integrierte Übertragung des IO-Link Sensorsignals der Station zur Steuerung
- 2 x M12 Schnittstelle mit jeweils einem digitalen Ein- und einem Ausgang zur Kommunikation mit anderen Förderbändern
- 2 x RJ45 Schnittstelle an der Frontseite
- Externe Spannungsversorgung über 4 mm Sicherheitsbuchsen oder Hohlstecker
- Inkrementalscheibe für Positionserfassung und Geschwindigkeitsmessung über optischen Sensor
- Verwendete Steuerung: S7-1215 DC/DC/DC mit 14 DI und 10 DO
- Zusätzliches Kommunikationsmodul mit 2 DI und 2 DO
- 2 x Rasttastschalter zur Simulation digitaler Eingänge des Kommunikationsmoduls
- Messung der Leistungs- und Energieaufnahme
- Hutschiene zur Erweiterung der SPS mit analogen oder digitalen IO Modulen
- Erweiterung der SPS um ein PROFIBUS-Mastermodul, ein AS-i-Bus Mastermodul oder ein IO-Link Mastermodul möglich
- 1 x RJ45 Kabel
- 1 x Step 7 Basic mit aktueller Version Step7 des TIA-Portals
Achtung: Nur für Schulen und Ausbildungsstätten im nicht gewerblichen Bereich.

Symmetrische Werkstückträgerplatte
Werkstückträger zur Aufnahme und zum Transport von Werkstücken auf Transportbändern. Der Werkstückträger verfügt über eine Einkerbung zur Aufnahme eines RFID-Tags.
- Länge = 180 mm, Breite = 119 mm, Höhe = 15 mm
- 2 Positionsgeber

DC-Netzteil (24V/5A) für IMS Bänder
Netzteil zur Spannungsversorgung von 24 V Verbrauchern.
- Eingangsspannungsbereich: (85 - 264) V AC
- Eingangsfrequenzbereich: (47 - 63) Hz
- Ausgangsspannung: 24 V DC
- Maximaler Ausgangsstrom: 5 A
- Maximale Leistung: 120 W

Schnittstellenkabel 25-polig, Sub-D-Buchse/Stecker, 1,8 m
25-pol SUB-D Verbindungskabel
- Anschluss: 25-pin Stecker / 25-pin Buchse
- Länge: 2 m
- Kontaktbelegung: 1:1

Interactive Lab Assistant: CRK10 Projektierung Kuka Roboter
Die Versuchsanleitung bildet ein Interactive Lab Assistant Kurs. Dieser Multimediakurs führt Schritt für Schritt in die Thematik der Roboterprojektierung. Grundlagen werden durch leicht verständliche Bilder vermittelt.
Besonderheiten:
- Interaktive Versuchsaufbauten
- Druckdokument zum komfortablen Ausdruck der Versuchsanleitung mit Lösungen
- Labsoft-Browser und Kurssoftware
Folgende Lerninhalte müssen mindestens enthalten sein:
- Hardwarekonfiguration
- Aufbau und Inbetriebnahme
- Einrichten der I/Os
- Einrichten des Arbeitsbereiches
- Sicherheitseinrichtung
- Grundlagen zu Koordinatensystemen
- Steuerung des Roboterarms
- Unterschiede der Roboterbewegungen
- Projektarbeiten
- Erstellung eines Projektes
- Bewegungsplan
- Bewegungen speichern
- Projektablauf
- Roboterkontrolle durch SPS
- Profineteinstellungen
- Projektierung mit Profinet
- SPS Projektierung
- Projektarbeit mit SPS
- SPS Programm
- Roboter Programm
- Kursdauer: ca. 10 h

QuickChart IMS 6 Mechatronisches Subsystem Prüfen
Kurzdokumentation zur schnellen Inbetriebnahme komplexer Geräte und Versuchsaufbauten.
- Anschlussbelegung, Sicherheitshinweise, Hilfestellungen
- Schalt- oder Montageplan
- Farbdruck im Format DINA3
- Laminierung: 2x250 µm


Modul CRK 11 gehört zum Industrie 4.0 Erweiterungsmöglichkeiten Paket
Sie haben schon Module und möchten diese erweitern?
Kein Problem...
Weitere Module für das CRK 11-Paket




- Automatisierungstechnik
- Industrie 4.0
- IMS Industrial Mechatronic System - die neue Generation
- Industrie 4.0 Erweiterungsmöglichkeiten
- CRK 11 Industrie Roboter mit Projektausstattung Prüfen
- Automatisierungstechnik | Industrie 4.0 | IMS Industrial Mechatronic System - die neue Generation | Industrie 4.0 Erweiterungsmöglichkeiten | CRK 11 Industrie Roboter mit Projektausstattung Prüfen |